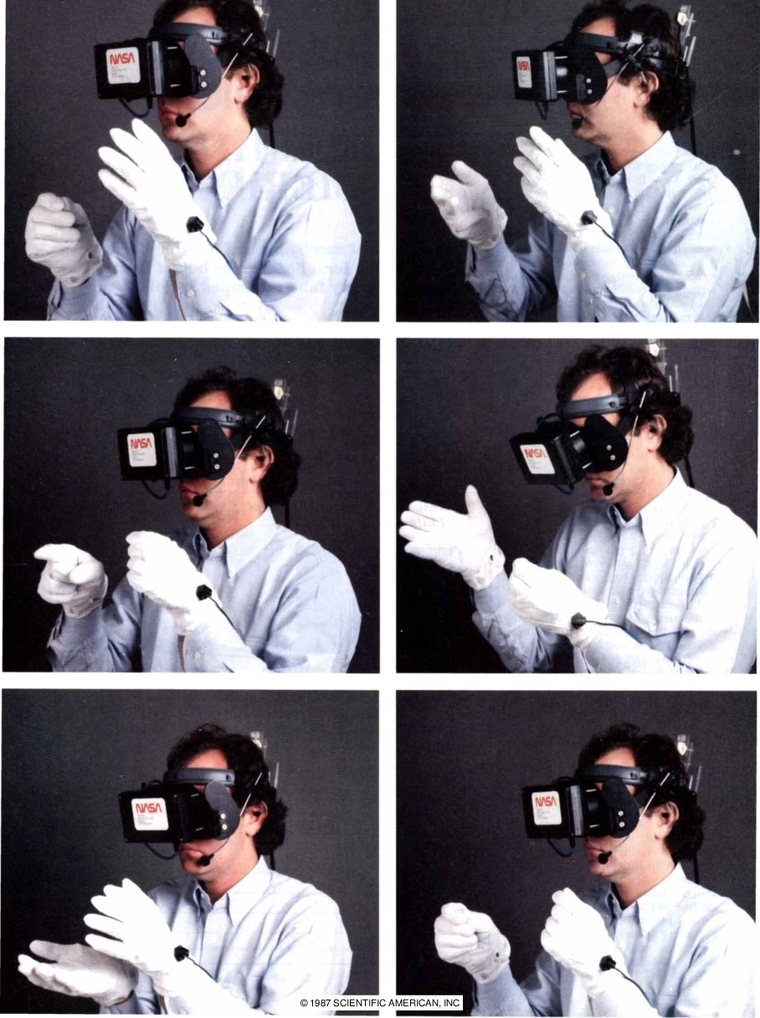
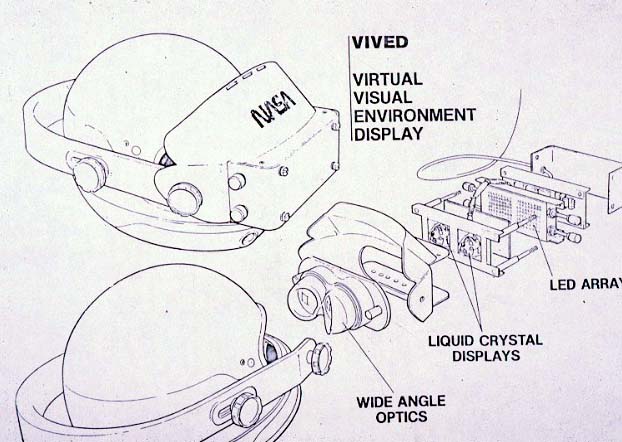
NASA VIEWlab Head-mounted Display, 1988
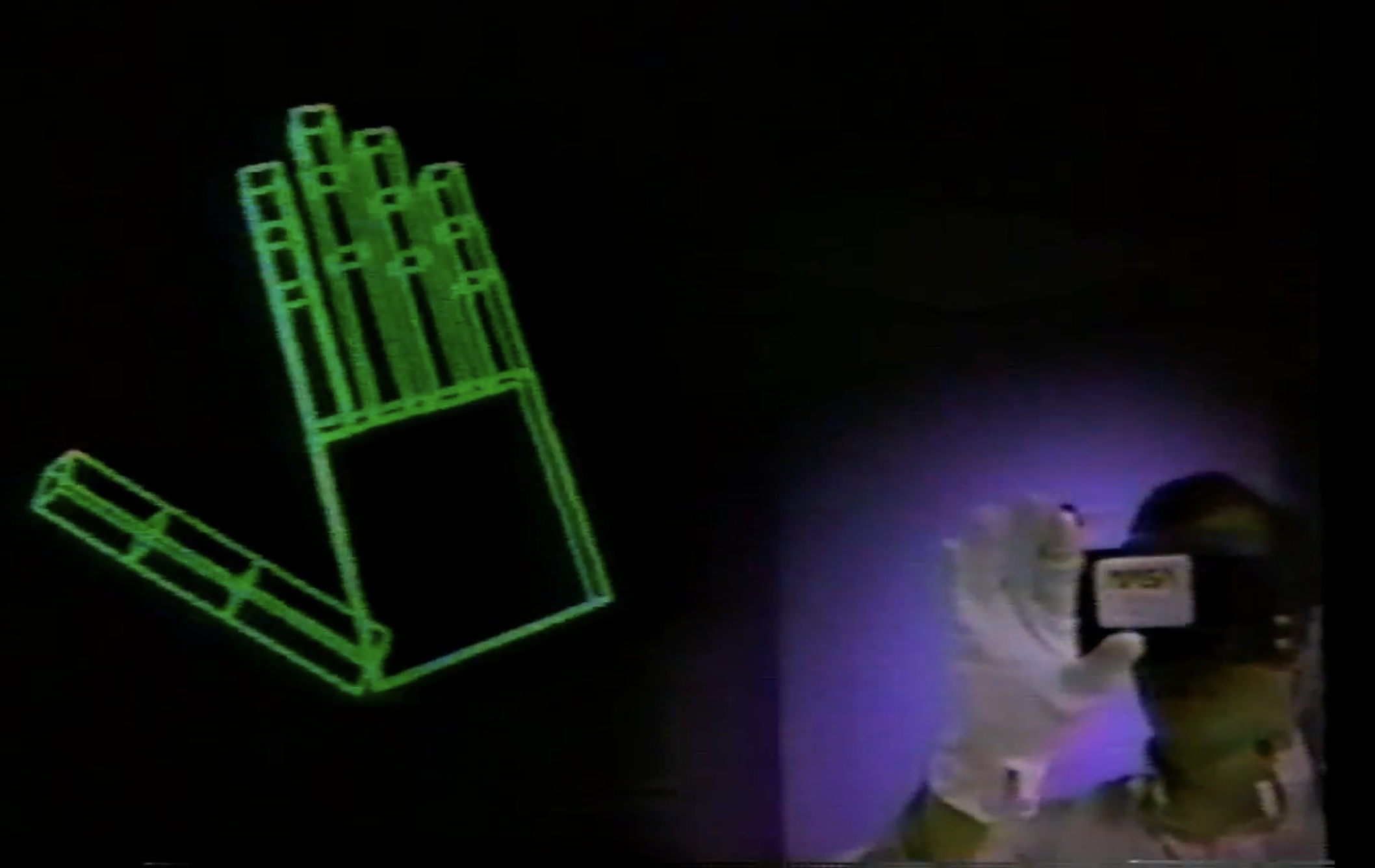
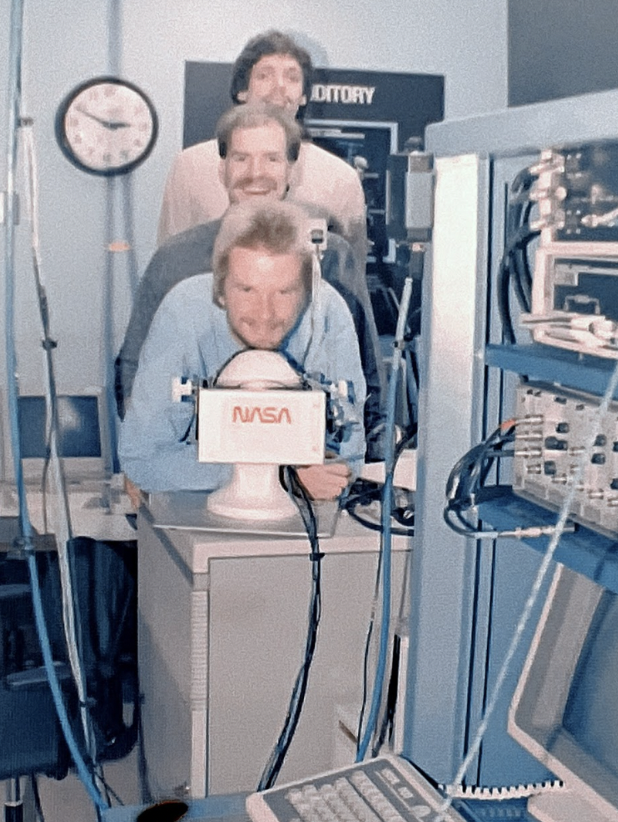
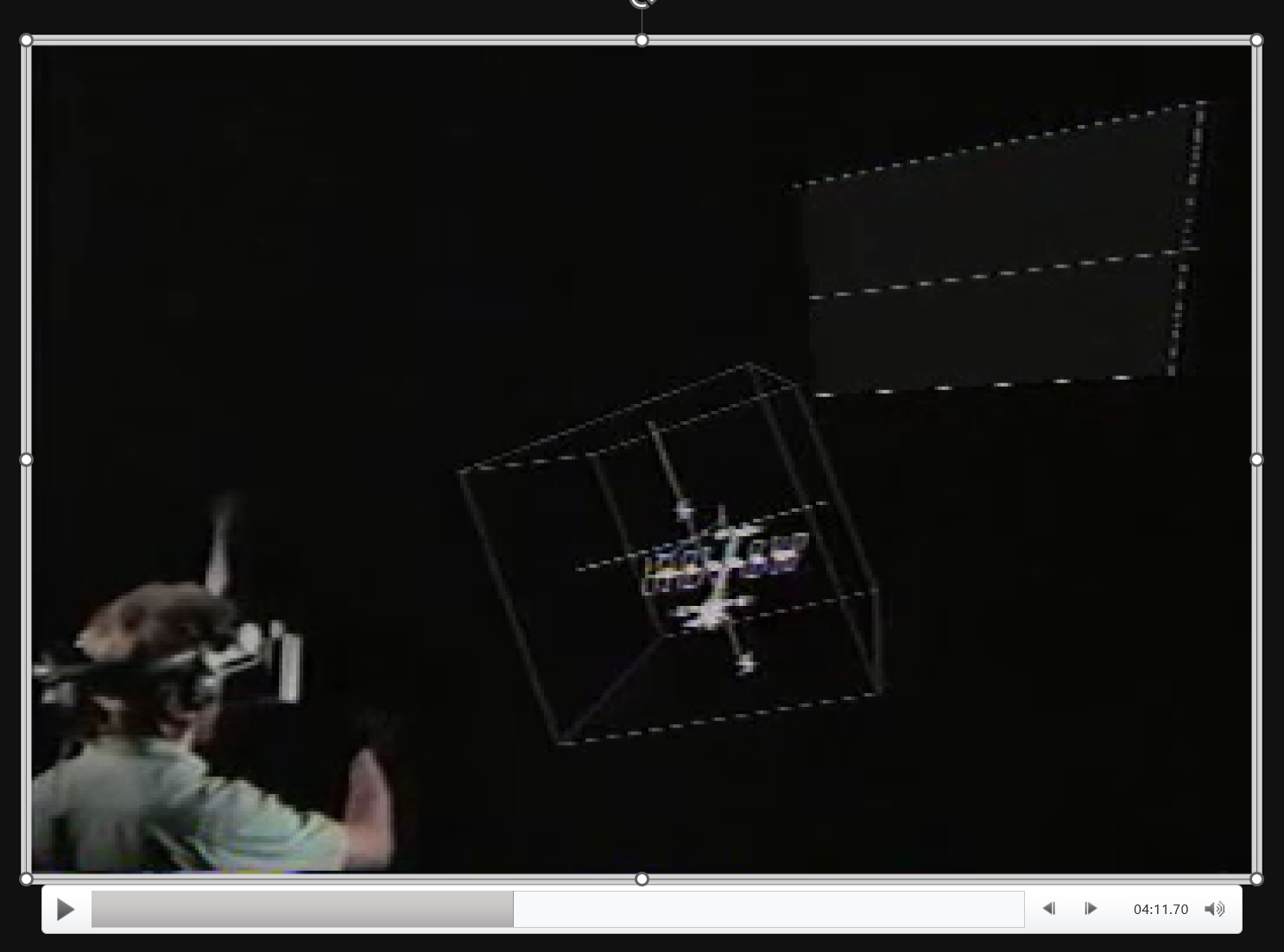
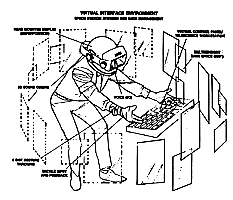
VIEWlab System Prototype 3, from the The Virtual Interface Environment Workstation (VIEW) project, 1988. In the Aerospace Human Factors Research Division of NASA's Ames Research Center, an interactive Virtual Interface Environment Workstation (VIEW) was developed as a new kind of media-based display and control environment that is closely matched to human sensory and cognitive capabilities. The VIEW system provided a virtual auditory and stereoscopic image surround that is responsive to inputs from the operator's position, voice and gestures. As a low-cost, multipurpose simulation device, this variable interface configuration allows an operator to virtually explore a 360-degree synthesized or remotely sensed environment and viscerally interact with its components. The Virtual Interface Environment Workstation system consists of: a wide-angle stereoscopic display unit, glove-like devices for multiple degree-of-freedom tactile input, connected speech recognition technology, gesture tracking devices, 3D auditory display and speech-synthesis technology, and computer graphic and video image generation equipment.